Team 31 CART Update (4/17/2020)
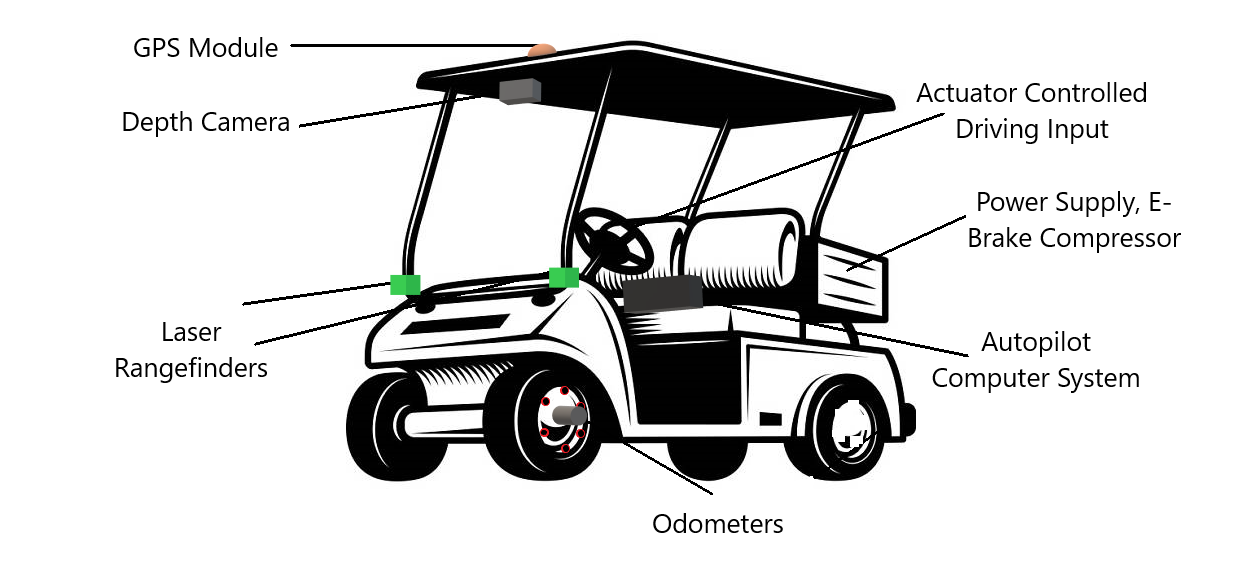
Thanks for reading our blog! If this is your first time reading our blog, we recommend you start with our first blog post . This is bittersweet - this is most likely our last blog. If you've enjoyed it, please feel free to reach out to us either through comments or email. Final Design and Prototype The intended final design of the Cougar Autonomous Robotic Transport (CART) is shown in the figure below. The major components of the CART include its perception sensors (Intel Realsense and Evo Rangefinders), its autopilot computer (PixHawk and Nvidia Jetson), and its auxiliary sensors and controllers. Final golf cart design The team procured most of the components needed for the prototype before the campus shutdown. Unfortunately, the lab sponsoring the laser rangefinders was unable to deliver the sensors before the shutdown due to COVID-19. An overview of the final prototype is shown in the figure below. The team hopes to obtain the laser rangefinders if the campus reop...





