Team 31 CART Update (4/17/2020)
Thanks for reading our blog! If this is your first time reading our blog, we recommend you start with our first blog post. This is bittersweet - this is most likely our last blog. If you've enjoyed it, please feel free to reach out to us either through comments or email.
In the plot shown below, the magnitude of the velocity vector from the Pixhawk was compared to the scalar ground speed output from the odometer. The test spanned ~2 minutes, in which the CART was manually driven at different speeds.
As can be seen from the graph, the values provided by the odometer are relatively accurate. The average deviation from the EKF data is on the scale of ~1 mph. The biggest incongruencies in the data occur when the CART’s speed changes rapidly. This is likely a result of variation in the sampling frequencies of the instruments. The EKF samples data at a rate of 1Hz while the odometer samples data at 5Hz. Another incongruence observed in the data is a “time lag”: As mentioned earlier, the speed reading from the GPS was not at the exact same frequency as the odometer. This frequency mismatch introduced a time delta. In the worst case, there is a 1 second lag between the odometer speed estimate and the GPS speed estimate. This lag could be remediated in post-processing to produce a cleaner plot, but ultimately, this error will be present in the system running at realtime. It is also worth noting that the Pixhawk’s firmware has methods that minimize these differences to ensure that sensor measurements are as recent as possible.
In spite of that issue, the results from the odometer tests are promising. The average error is low, indicating that the odometer and the GPS usually agree on the speed. This is great, as the purpose of the odometer is to provide another state observer to the Pixhawk’s state estimation algorithm (EKF) and provide very stable speed readings even at very low speeds (where GPS speed estimation would be less accurate). Note that we are currently not providing this odometry information to the Pixhawk in real time.
We also validated the brake upgrade that we installed over winter break.This upgrade was designed to reduce the CART’s stopping capability to within a safe distance. We originally determined this distance to be 20ft due to the range limitations of the object detection sensors we selected. Due to equipment sponsorship opportunities falling through, we were forced to pivot to the Intel RealSense depth camera, which has a range of ~35ft. Noting this hardware change, the team set the desired stopping distance cap at 25ft at the maximum speed of 10mph.
To test the upgrade, the CART was driven at speeds of 5 and 10 mph. On each run, the CART was brought up to speed, then upon reaching a designated marker on the ground, was stopped by activating the appropriate braking option. Once at a complete stop, the distance between the marker and the CART was measured with a measuring tape. Each option was tested 3 times at each speed, and the results can be seen in the chart below.
The results of this test shows that the upgrade, on average, reduced the braking distance to 27ft at 10mph. This does not achieve our goal of 25ft, although is 10ft within the limits of our obstacle detecting range. We determined this result was a marginal success because while it failed to meet our set standard, the upgrade still brought the stopping distance well within the range of our obstacle sensors. Therefore the original goal of increasing the safety margin that the CART’s performance could provide to an acceptable level.
These results can be improved by limiting the backflow of pressurized air through the low pressure regulator with additional one way valves.
The team also tested the functionality of the perception system. Data from the depth camera was converted to an occupancy grid as shown below. Each grid is equivalent to 0.5 meters of space. The orientation and distance of obstacles relative to the camera frame are accurate. Tests are ongoing to determine the reliability of the data.
The team is satisfied with the data from validation so far. It is great to know that the upgrades installed work, and that our sensors are performant as expected.
Before we conclude the project, we plan to finish validating everything. We’d also like to integrate everything as best as possible before handing the CART back to the university, because the goal was not to build components, but a working and cohesive system.
Final Design and Prototype
The intended final design of the Cougar Autonomous Robotic Transport (CART) is shown in the figure below. The major components of the CART include its perception sensors (Intel Realsense and Evo Rangefinders), its autopilot computer (PixHawk and Nvidia Jetson), and its auxiliary sensors and controllers.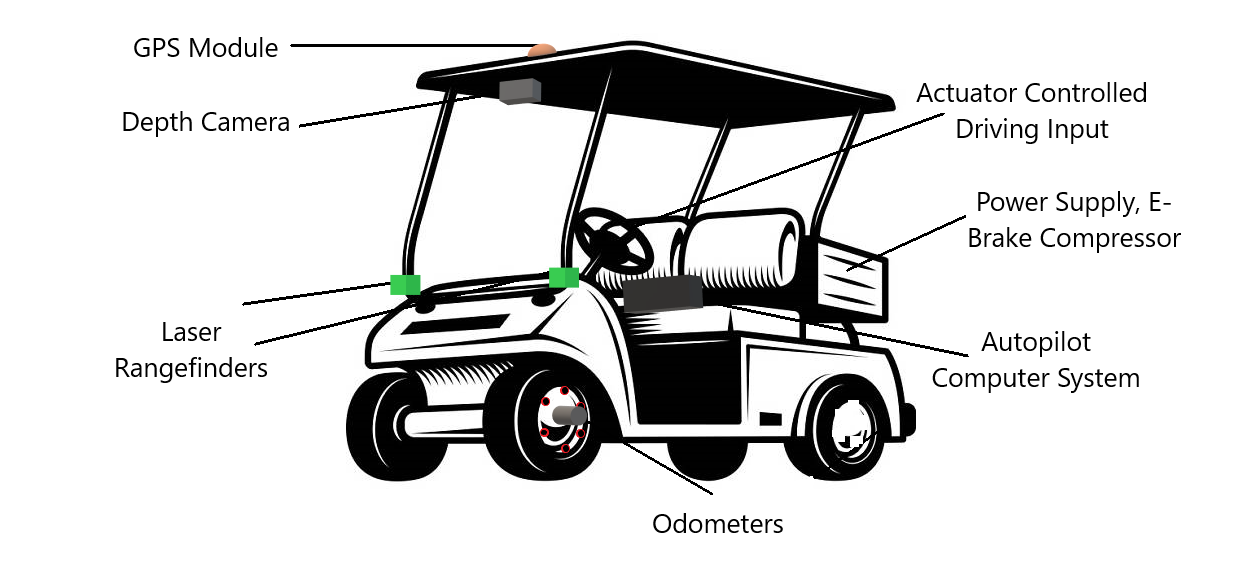 |
| Final golf cart design |
The team procured most of the components needed for the prototype before the campus shutdown. Unfortunately, the lab sponsoring the laser rangefinders was unable to deliver the sensors before the shutdown due to COVID-19. An overview of the final prototype is shown in the figure below. The team hopes to obtain the laser rangefinders if the campus reopens before the end of the school year.
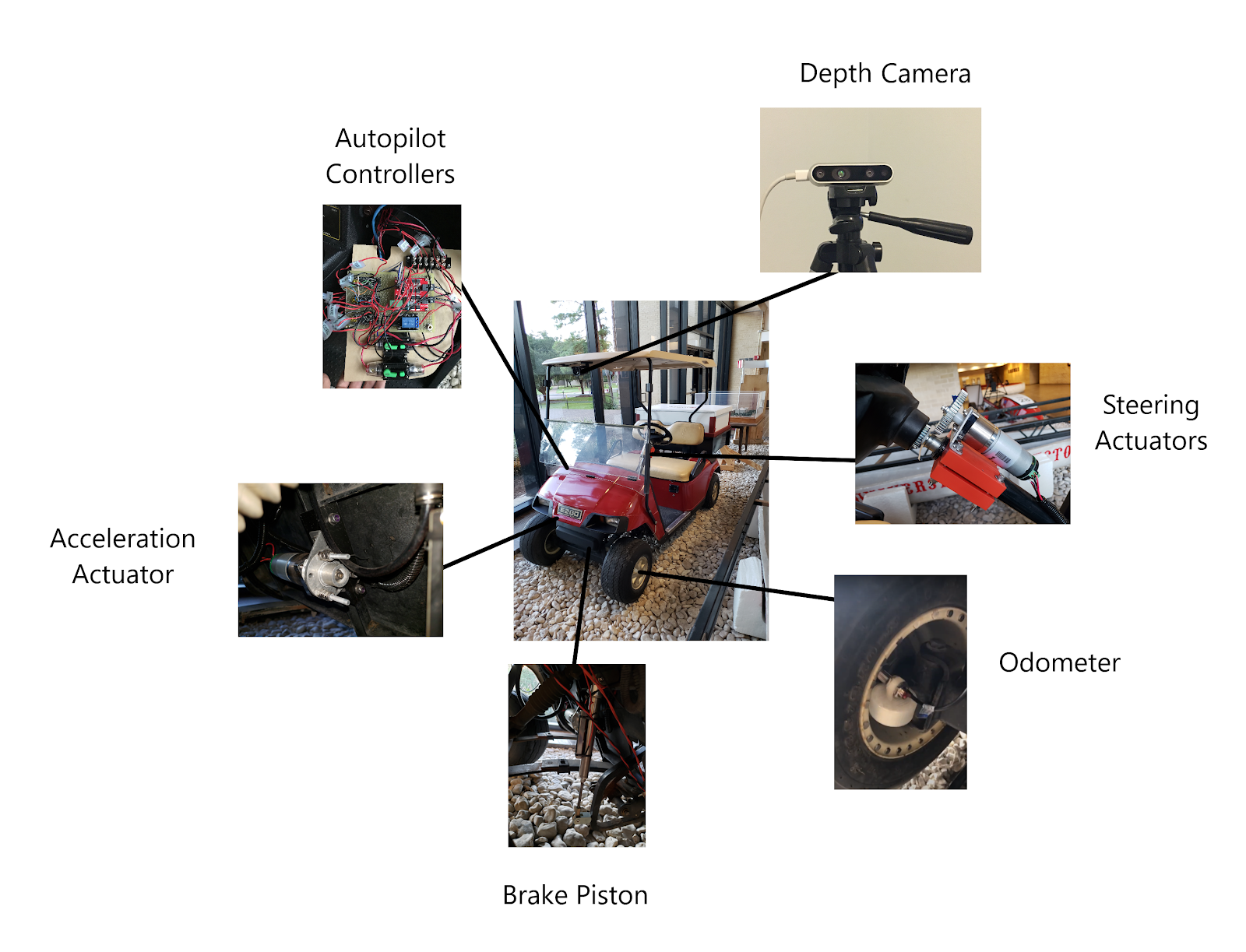 |
| Overview of the components of the system |
Current Validation Results and Improvements
The team is still in the process of validating the final design of the CART. Some subsystem validation tests have already been completed. For example, the team has validated the onboard odometry system by comparing the speed recorded by the odometer to the GPS/IMU derived speed estimate of the Pixhawk. The GPS and IMU sensors are fused via an extended kalman filter (EKF) to provide an estimate of the state of the golf cart. The speed of the golf cart is contained in the state estimate output supplied by the EKF.In the plot shown below, the magnitude of the velocity vector from the Pixhawk was compared to the scalar ground speed output from the odometer. The test spanned ~2 minutes, in which the CART was manually driven at different speeds.
 |
| Validation test for our odometer |
In spite of that issue, the results from the odometer tests are promising. The average error is low, indicating that the odometer and the GPS usually agree on the speed. This is great, as the purpose of the odometer is to provide another state observer to the Pixhawk’s state estimation algorithm (EKF) and provide very stable speed readings even at very low speeds (where GPS speed estimation would be less accurate). Note that we are currently not providing this odometry information to the Pixhawk in real time.
We also validated the brake upgrade that we installed over winter break.This upgrade was designed to reduce the CART’s stopping capability to within a safe distance. We originally determined this distance to be 20ft due to the range limitations of the object detection sensors we selected. Due to equipment sponsorship opportunities falling through, we were forced to pivot to the Intel RealSense depth camera, which has a range of ~35ft. Noting this hardware change, the team set the desired stopping distance cap at 25ft at the maximum speed of 10mph.
To test the upgrade, the CART was driven at speeds of 5 and 10 mph. On each run, the CART was brought up to speed, then upon reaching a designated marker on the ground, was stopped by activating the appropriate braking option. Once at a complete stop, the distance between the marker and the CART was measured with a measuring tape. Each option was tested 3 times at each speed, and the results can be seen in the chart below.
 |
| Validation of brake upgrade |
The results of this test shows that the upgrade, on average, reduced the braking distance to 27ft at 10mph. This does not achieve our goal of 25ft, although is 10ft within the limits of our obstacle detecting range. We determined this result was a marginal success because while it failed to meet our set standard, the upgrade still brought the stopping distance well within the range of our obstacle sensors. Therefore the original goal of increasing the safety margin that the CART’s performance could provide to an acceptable level.
These results can be improved by limiting the backflow of pressurized air through the low pressure regulator with additional one way valves.
The team also tested the functionality of the perception system. Data from the depth camera was converted to an occupancy grid as shown below. Each grid is equivalent to 0.5 meters of space. The orientation and distance of obstacles relative to the camera frame are accurate. Tests are ongoing to determine the reliability of the data.
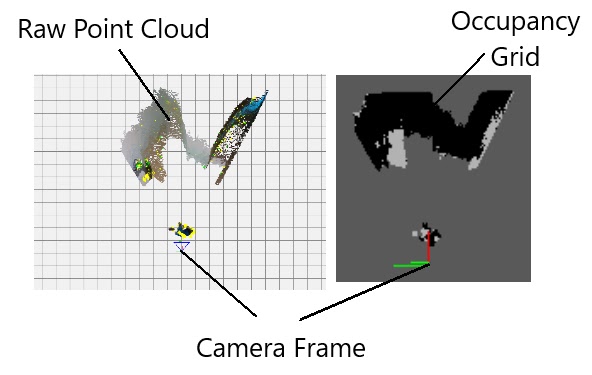 |
| Images of an occupancy grid generated with depth data from the RealSense |
Satisfaction with Current Results
The team is generally unsatisfied with the amount of validation that has been completed so far. In our original Gantt chart, we had planned to be done with validation by now and working on improvements to our CART. Unfortunately, we are behind that original schedule. The schedule is primarily affected by the campus shutdown.The team is satisfied with the data from validation so far. It is great to know that the upgrades installed work, and that our sensors are performant as expected.
Before we conclude the project, we plan to finish validating everything. We’d also like to integrate everything as best as possible before handing the CART back to the university, because the goal was not to build components, but a working and cohesive system.



Comments
Post a Comment