Team 31 CART Update (3/6/2020)
Thanks for reading our blog! If this is your first time seeing on our blog, we recommend you start at our first blog post.
After the break, we plan to mount the RealSense camera and the Rangefinders onto the CART. We anticipate initially designing a temporary mount until the obstacle detection software is fully developed. After conducting preliminary tests, a permanent mount will be designed for the perception sensors. The primary challenge to completing this task is the possibility of a delay in obtaining the Rangefinders. To reduce this risk of delays, we plan to visit the NCALM immediately after the break to collect the sensors. We anticipate commencing validation tests in the last week of March.
Progress since our last post (February 14 - March 6)
We finally installed our odometry solution. We had to mount it externally, since we were not able to mount it on an axle within the motor that drives the CART (this is the typical implementation, and is what almost every car does). This is because we are limited to solutions that do not involve permanent modifications to the CART. To implement our odometry solution, we used 24 equally-spaced magnets (about every 2 inches or so) around the perimeter of the wheel. This provided a high angular resolution. We validated the odometer by comparing the reported speed to the estimated speeds provided by two different GPS-based speedometer apps on an iPhone 7.
After validating the odometer, we designed and 3D-printed a stable mount for the sensor (we initially used zip ties). Note that the odometer is contactless, and the mount will not support any external loads. Because it supports no loads, we decided not to conduct an FEA analysis on the mount. The mound has been installed, and to date, has performed as expected.
Additionally, we conducted an outdoor test of the Intel RealSense depth camera. We found the performance outside during the day to be much better, even in slightly overcast conditions (Intel’s site notes that in general, the brighter it is outside, the better their camera performs). This test was to ensure that the camera could pick up objects far away, but we have not yet assessed how accurate the depth camera is (Intel says that error grows quadratically with distance from the camera). We recorded that the depth camera detects objects between 3.7ft and 37ft from the camera.
During this time, we also planned to test and install the laser rangefinders (TeraRanger Evo 60m) on the CART. However, due to schedule constraints, we have not yet received the devices from the NCALM (the lab on campus that is lending them to us). We anticipate receiving these within the next 2 weeks.
Finally, we have not been able to track down the high-performance laptop that was used by the previous year’s team when testing the CART. This is not critical for the continued development of the CART, as we can use a team member’s laptop in the interim, but it would be nice to have a dedicated development and testing machine that more or less would stay with the CART (even after we leave, and the next team continues with the project).
 |
| Odometry: Hall effect sensor mounted to the CART It has detected a magnet, so the LED is red |
After validating the odometer, we designed and 3D-printed a stable mount for the sensor (we initially used zip ties). Note that the odometer is contactless, and the mount will not support any external loads. Because it supports no loads, we decided not to conduct an FEA analysis on the mount. The mound has been installed, and to date, has performed as expected.
Additionally, we conducted an outdoor test of the Intel RealSense depth camera. We found the performance outside during the day to be much better, even in slightly overcast conditions (Intel’s site notes that in general, the brighter it is outside, the better their camera performs). This test was to ensure that the camera could pick up objects far away, but we have not yet assessed how accurate the depth camera is (Intel says that error grows quadratically with distance from the camera). We recorded that the depth camera detects objects between 3.7ft and 37ft from the camera.
 |
| Depth camera: Near distance test Note that the black areas are "unknown depth" |
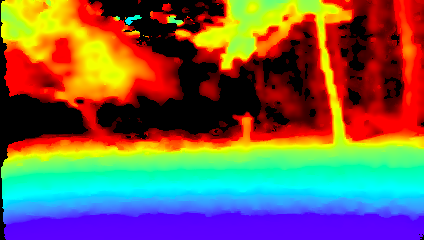 |
| Depth camera: Far distance test Note that there is a man standing in the center of the frame (hard to see) |
During this time, we also planned to test and install the laser rangefinders (TeraRanger Evo 60m) on the CART. However, due to schedule constraints, we have not yet received the devices from the NCALM (the lab on campus that is lending them to us). We anticipate receiving these within the next 2 weeks.
Finally, we have not been able to track down the high-performance laptop that was used by the previous year’s team when testing the CART. This is not critical for the continued development of the CART, as we can use a team member’s laptop in the interim, but it would be nice to have a dedicated development and testing machine that more or less would stay with the CART (even after we leave, and the next team continues with the project).
Planned work for the near future (March 6 - March 20)
Next week (March 9 - March 13) is the University of Houston’s Spring break. During this time, members of the CART team will be recuperating from the stresses of the semester. To maximize productivity during the break, we plan to remotely work on installing the packages needed to use the depth camera. The main challenge to completing this task is the lack of a designated computer for the CART’s obstacle detection development. To avoid delays, we plan to use our personal computers for preliminary development of the obstacle detection software. We also plan to perform some much needed maintenance on the wiring for the autopilot computer/actuator control boards.After the break, we plan to mount the RealSense camera and the Rangefinders onto the CART. We anticipate initially designing a temporary mount until the obstacle detection software is fully developed. After conducting preliminary tests, a permanent mount will be designed for the perception sensors. The primary challenge to completing this task is the possibility of a delay in obtaining the Rangefinders. To reduce this risk of delays, we plan to visit the NCALM immediately after the break to collect the sensors. We anticipate commencing validation tests in the last week of March.


Comments
Post a Comment